 |
 |
 |
 |
|
Description: - The OpenPilot Revolution
board, also called 'Revo', is a new breed of Autopilot using the STM32F4
series, 210MIPS ARM Micro-controller. This is important, as it contains
a hardware floating point unit (FPU), which is a huge advancement for
hobby-class autopilots. Of course, OpenPilot has been 32bit since day
one, and the FPU is another step up the performance ladder. The FPU
allows precise, low-latency processing of real-life measurements using
advanced attitude estimation algorithms. - The Revolution is a
flight control computer with autopilot, intended for multirotors,
helicopters and fixed wings. It is a full 10DOF with gyroscope,
accelerometer, magnetometer and pressure sensors. Technical description CPU - CPU is the STM32F405RGT6 chip, with ARM Cortex-M4 core at 210MIPS, FPU, and saturation arithmetics DSP functions. -
The chip features a range of built-in hardware modules that can bo
programmed once and function independently, requiring little to no CPU
overhead. These include 14x multichanel timers, 3x synchronous-sampling
ADC serving up to 24 channels, 2x DAC, matrix memory controller with
16-stream DMA, and other. Communication modules include USB2.0, 3x I2C,
3x SPI, 4x USART, 2x CAN and SIDO. All these modules can be configured
for accessing the chip pins using a flexible switch matrix, or disabled
to save power. - It even contains a real time hardware calendar if you want a wake up flight. - The software and settings are loaded through USB connector and no-hassle update function in the GCS (Ground Control Station). Modem - The board features a built-in 433MHz OPLink Modem. Dimensions -
OpenPilot products use the standard OpenPilot footprint, and hence has
the same dimensions and mounting holes as the OpenPilot CC. CC3D, Revo,
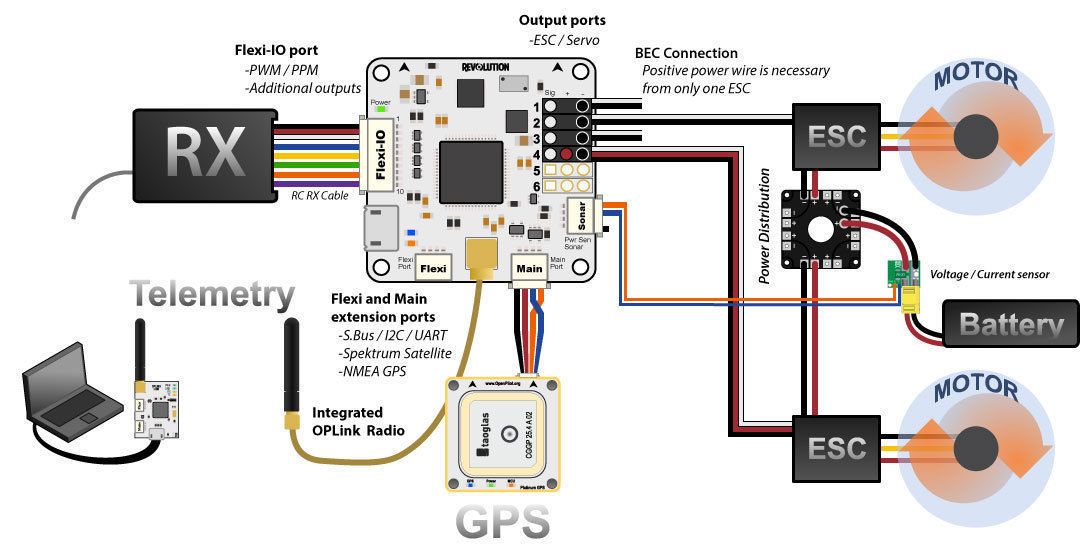
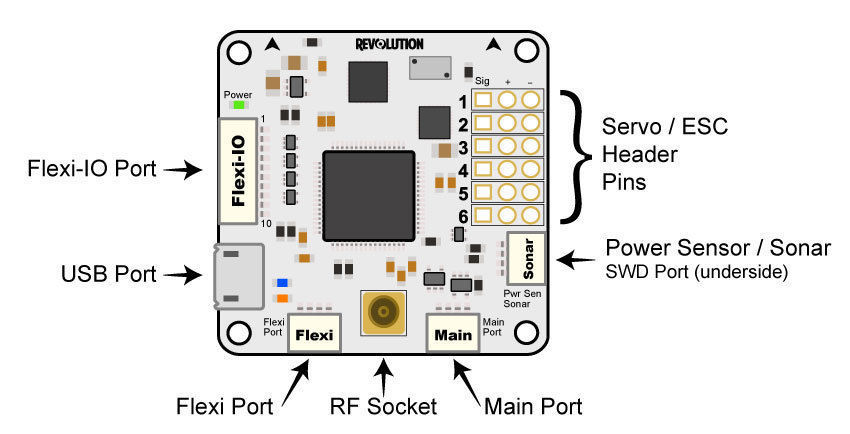
GPS, OSD and PipX boards. Ports: -
Servo 1-6: These are the PWM outputs that go to servos or electronic
speed controllers (ESCs). Power for the flight controller is typically
supplied through these headers from only one of the ESCs, but in most
cases, all the servo wires can be left connected. Cutting the pin from
servo wires is highly discouraged. If you feel you must disconnect
three of the hot wires, use some shrink tube or electrical tape to
insulate the removed pin (you may need that positive voltage at a later
date!). The positive (Vcc) and negative (Gnd) pins are indicated on
this diagram and the board. In rare cases, you may need to also
disconnect the ground pin if your ESCs are creating ground loop problems
(indicated by a general weirdness in setup). (see the CopterControl -
CC3D -Atom Hardware Setup page, Power section, for instructions on how
to remove and insulate the extra pins) Servo output pin layout is: - Outside --> ground - Middle --> 5V - 8.4V - Inside --> signal Flexi-IO
Port: JST-SH 10-pin. The receiver port can act as an input or output
port depending on the configuration which is set in the Hardware
Settings. Configuring the receiver port as an output port allows the
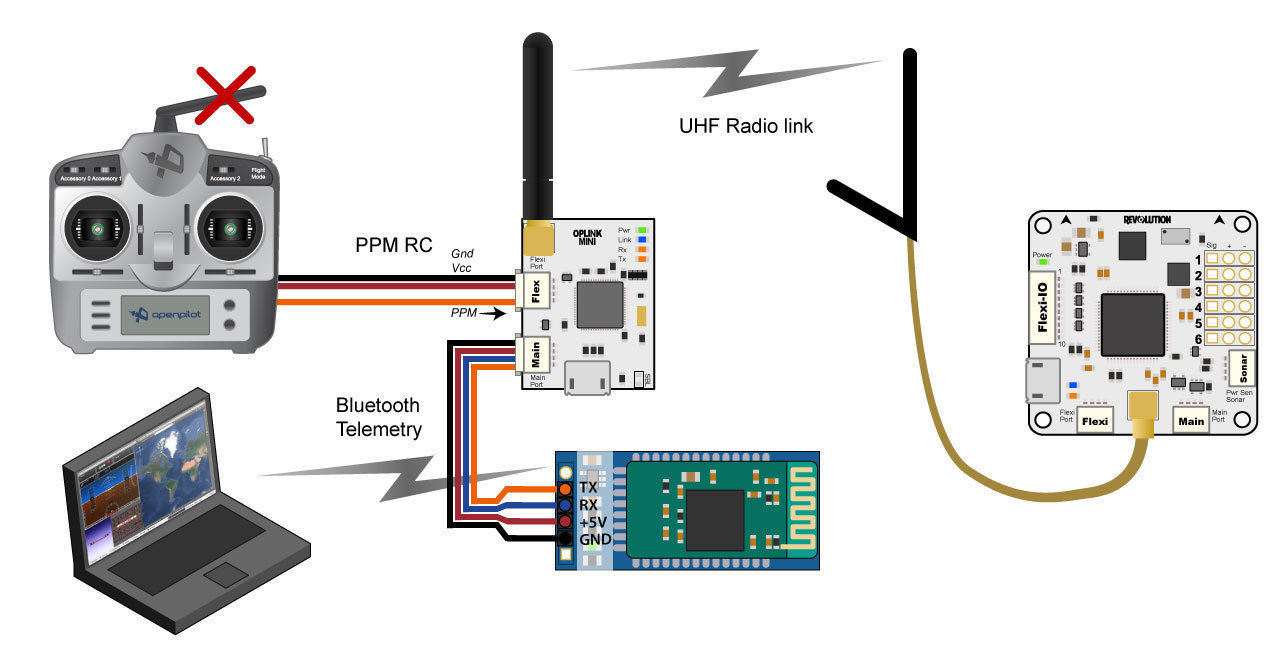
user to assign more output channels then the 6 standard servo outputs. PWM -vs- PPM Recievers -
Please be aware that not all receivers can be configured to use a PPM
output. It is the user's responsibility to research this feature in
regards to the desired receiver they wish to use for PPM and ensure it
can be used as such. Many hours of frustration can occur while trying to
troubleshoot why you can't get your radio to connect to the board with
PPM if using a receiver than isn't designed with that feature! Simply
make sure the receiver can do it before trying to set it up that way.
MainPort: JST-SH 4-pin. This is a serial USART whose baud rate can be
adjusted through the GCS. Optionally, Futaba S.Bus receiver,
Spektrum/JR satellite receiver or GPS can be mapped to the MainPort.
Default configuration is Telemetry for connecting an RF modem.
FlexiPort: JST-SH 4-pin. The function of this port also depends on
the configuration and can be configured for I2C or Serial. The default
configuration doesn't use this port, but it can be used for Telemetry,
GPS, Spektrum satellite receivers (all working), and other I2C
peripherals (under development). RF Socket: Antenna connection socket for on-board OPLink modem.
Pwr Sen/Sonar Port: JST-SH 4-pin. This port can be configured to
accommodate an Autopilot current sensor and a low cost Sonar sensor such
as the HC-SR04. It can also be used as a general purpose input/output
port or as a one or two channel analog input port. Please
note that the output rate on the output channels from the Flexi-IO Port
cannot be set individually. If servos are connected to this outputs,
you must ensure that they can work with the defined output rate for the
bound channel. E.g. if you choose a high output rate to support an
octocopter configuration, the update rate from the output channels from
the ReceiverPort are bound to the update rate from channels 5 & 6.
In this case, you cannot connect analog servo's to these outputs since
an analog servo only supports an output rate of 50Hz.. Sensor suite - 3 Axis Gyro - 3 Axis Accelerometer - 3 Axis Magnetometer - Barometric pressure sensor - Gyro/Accelerometer OPLM Transceiver Description: -
The OPLink is a radio transceiver backed by an ARM32 powered digital
packet processor specifically designed for the OpenPilot project, it was
originally developed under the codename: PipXtreme and there are many
artifacts that still reflect this. It is a two-way radio system allowing
real time telemetry information for the Ground Control Station,
Wireless Configuration and even radio control fr om your transmitter
over a single communications link. - You will need two OPLink
radios to establish a connection between the vehicle and ground station.
Note that the Revolution board has an OPLink built into the flight
controller. The same firmware version must be running in Revo and OPLM
devices (i.e. if you upgrade one board, you will need to upgrade all
others that are 'bound' together). - The OPLM units operate at
433Mhz. This means that there will be a frequency conflict if you
operate the vehicle using a UHF 433Mhz system. In basic terms, this
conflict will lead to a loss of vehicle control and / or a crash. Use
transmitters in other parts of the spectrum (i.e. 2.4G, 27Mhz, 36Mhz)
for vehicle control if you intend to enable the OPLink on your Revo for
transmission of telemetry data. If you wish to use a 433Mhz transmitter
for vehicle control, then use an OPLM which will by default, enable the
transmission of telemetry. - Check local laws and regulations regarding radio licensing, see our Radio Licensing article for more information. -
The device that is intended to undertake the most of the transmissions
should be allocated as the Co-ordinator. If you wish to use the OPLM for
vehicle control, then the Co-ordinator should be the OPLM device in
your transmitter module at the ground station. In this case, the Revo or
another OPLink will be acting as a slave receiver but will also
transmit telemetry information to your ground station which is comprised
of another OPLM connected to a computer that is running the OP GCS
Flight Data page. Alternatively, if you wish to simply receive telemetry
data at the ground station, then the Revo should be configured as the
Co-ordinator. Configuration instructions are provided below and
linked-to pages. First time use with OPLM -
When you first try to use your OPLM with the GCS, it will not be
automatically picked up by the GCS. You first need to go into the
'Firmware' tab and click 'Upgrade & Erase' while the OPLink is
disconnected. Then plug in OPLink when the upgrade process asks for it.
Once this has been done, your OPLM board will show up at the bottom of
your GCS as a connected device. The configuration page icon at the
bottom of the page icon list may be hidden without scrolling down,
depending on the size of your computer screen. Ublox NEO-M8N GPS Description: - The newest high precision GPS with electronic compass, small volume 35*35mm dimension - Suitable for flight control such as CC3D Revolution Flight Controller - With shell, the cables are fixed and cannot be moved, can connect with CC3D Revolution Flight Controller - Internal core of new version surpasses 6M, compare favourably with 6H - Cold start positioning time is less than 40 seconds - Warm start positioning time is less than 5 seconds - Positioning accuracy is 2m - NEO-8N is of high performance, quick research, high positioning precision, very rstable 2-6S Distribution Board Description: - CC3D revolution distribution board is wtih two channels of BEC output, 2-6S output, 5V output 3.A 12V output 3A - If you need 12V stable output, the min input is 4S. - The holes pitch is exactly the same with CC3D revolution flight control board - Adopting copper shielding cover, high quality and performance, low price -
Adopting high standard industrial TI chip, and optimize the PCB board,
after the repeated testing, it turns out to be a satisfactory product. - Thicken copper cover, great stability, with shielding cover - Weight: 8g Package includes: - OPLM CC3D Revolution flight controller x 1 - U-blox NEO-8N GPS x 1 - 2-6S Distribution Board x 1  |